Current Control Simulation by LTspice
Introduction
When controlling a motor or connecting to the grid by a voltage-source inverter (VSI), current control*1 is necessary. Nowadays, it must be rare to do the job with an analog circuit using operational amplifiers, etc.*2 whereas microcontrollers, DSPs (digital signal processors), and/or FPGAs (field-programmable gate arrays) are chosen as the control hardware. In this case, the system becomes discrete-time where the control computation routine is called cyclically every sampling period like functions called by a timer interruption, etc. A dead time is then introduced for time T so that the control gain design is an issue to ensure stability. Moreover, in the VSI control, PWM converts the output voltage reference to a pulse pattern which has the same average value.
I have learned power conversion circuits and their control. Yet, my understanding to the current control was really ambiguous. Hence, I try to perform the following two comparisons using LTspice XVII and my own control system library, Contraille.
- Continous-time (analog) vs. discrete-time (digital) controls
- Arbitrary vs. pulse-width-modulated voltage sources
The object here is a simple RL circuit.
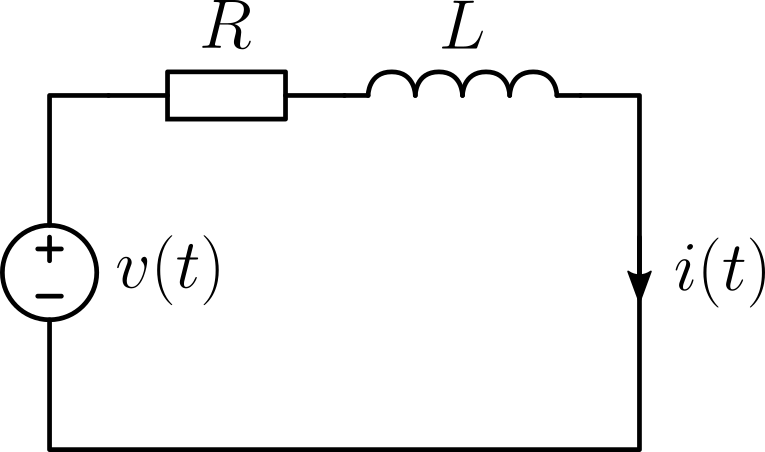
The voltage v(t) is adjusted so that the current i(t) has a desired value or waveform. In this case, the "controlled variable" is i(t) whereas v(t) is called the "manipulated variable" although this term seems not widely used. Just in case, t is time and both v(t) and i(t) become a function dependent on time t.
DISCLAIMER: This entry may contain technical errors!
My smattering knowledge heard from others
It is often said (?) that when R = 0 Ω and the sampling period is T, the current i(t) does not overshoot by setting the current control proportional gain KP to satisfy:
This is stated in, e.g., Refs. *3 and *4. However, it could be necessary to pay one's own effort to understand it. So, I will try to play with block diagrams and equations.
*1:Sometimes current control is referred to as "ACR", but I guess this is a Japanese English.
*2:早川:「初めての自立移動ロボット制御シミュレーション」,トランジスタ技術,2020年7月号,pp. 71-86
*3:J. Tahara, H. Fujita, and H. Akagi, "Control and performance of a PWM eectifier with an FPGA-based current controller," IEEJ Technical Meeting on Semiconductor Power Converter, SPC-05-14, Jan. 2005, Osaka, pp. 33-38.
田原・藤田・赤木:「FPGAによる高速電流制御を適用したPWM整流器の動作特性」,電気学会半導体電力変換研究会資料SPC-05-14,pp. 33-38,2005年1月,大阪
*4:H. Akagi, E. H. Watanabe, and M. Aredes, Instantaneous Power Theory and Applications to Power Conditioning, Wiley, 2007
Greetings
I would like to translate some of the entries of my blog in Japanese linked below to English and present them in this blog so that more people can read it.
I am interested in electrical and electronic engineering, especially control systems for three-phase grid-tied inverters. Electronic hobbies using Raspberry Pi's and Mbed microcontrollers such as Nucleos may also be added.